



Kuka库卡机器人维修的基本原则有哪些呢?先功放板后设备:Kuka库卡机器人焊机的功率放大部分的毛病率在整个超声波设备中占的份额很高,所以先检修超声波发生器的功率放大部分往往能够事半功倍。先静态后动态:在设备未通电时,判别电气设备按钮、接触器、继电器以及保险丝的好坏,然后断定毛病的地点,通电实验,听其声、接触、测参数、判别毛病,终进行修理。先清洁后修理焊机:对污染较重的电气设备,先对其按钮、接线点、接触点进行清洁,查看外部控制键是否失灵,许多毛病都是由脏污及导电尘块引起的,一经清洁毛病往往会扫除。

流量计维修流程:目视检查所有ABB机器人部件,检查传感器轮是否有磨损或损坏的部件,并且可以自由旋转,所有电路都经过了损坏或短路元件的测试,必要时进行ABB机器人维修,然后将功率施加到单元并且模拟流动,然后测试输出并验证,测试所有的信号强度和数据内容,必要时进行维修和调整,然后重新测试。输入和输出模块修复过程:OEM特定测试站用于测试I/O模块。
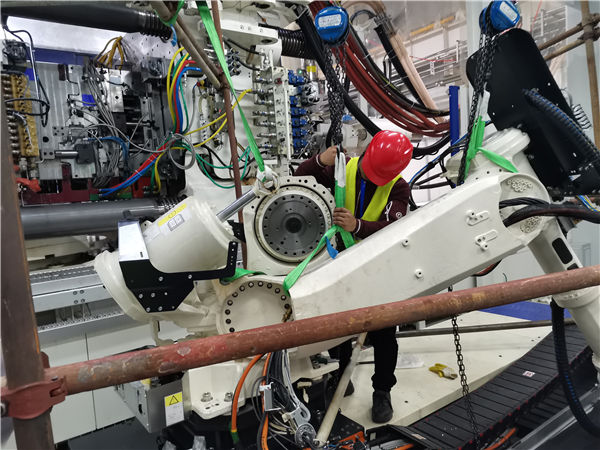
机器人在维修时一定要注意检查机器人的电器控制箱内有没有水或者油的进入,如果电器发生受潮等现象一定不可以忙着进行开机,然后检查供电的电压是否符合相关的规定,而且前后安全门的开关是不是正常。接着打开供应电源,机器人需要拆除的时候,一定要关掉供应电源,这一点一定要记住。接着继续进行维修时要放松引拔气缸固定板固定螺丝,并且移动机器人的手臂,让其靠近拱。移动缓冲器座,让它靠近机器人手臂,保证机器人处于正常的维修状态。





 在线客服
在线客服 18842585256
18842585256 871198204@qq.com
871198204@qq.com